14
AI 요약
이 글은 AI가 원문을 분석하여 핵심 내용을 요약한 것입니다.
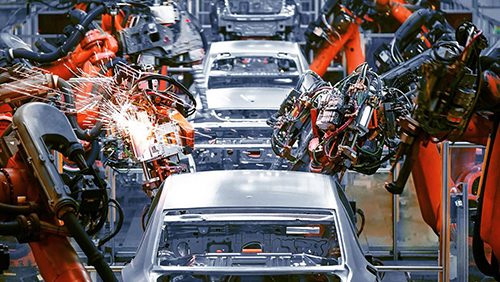
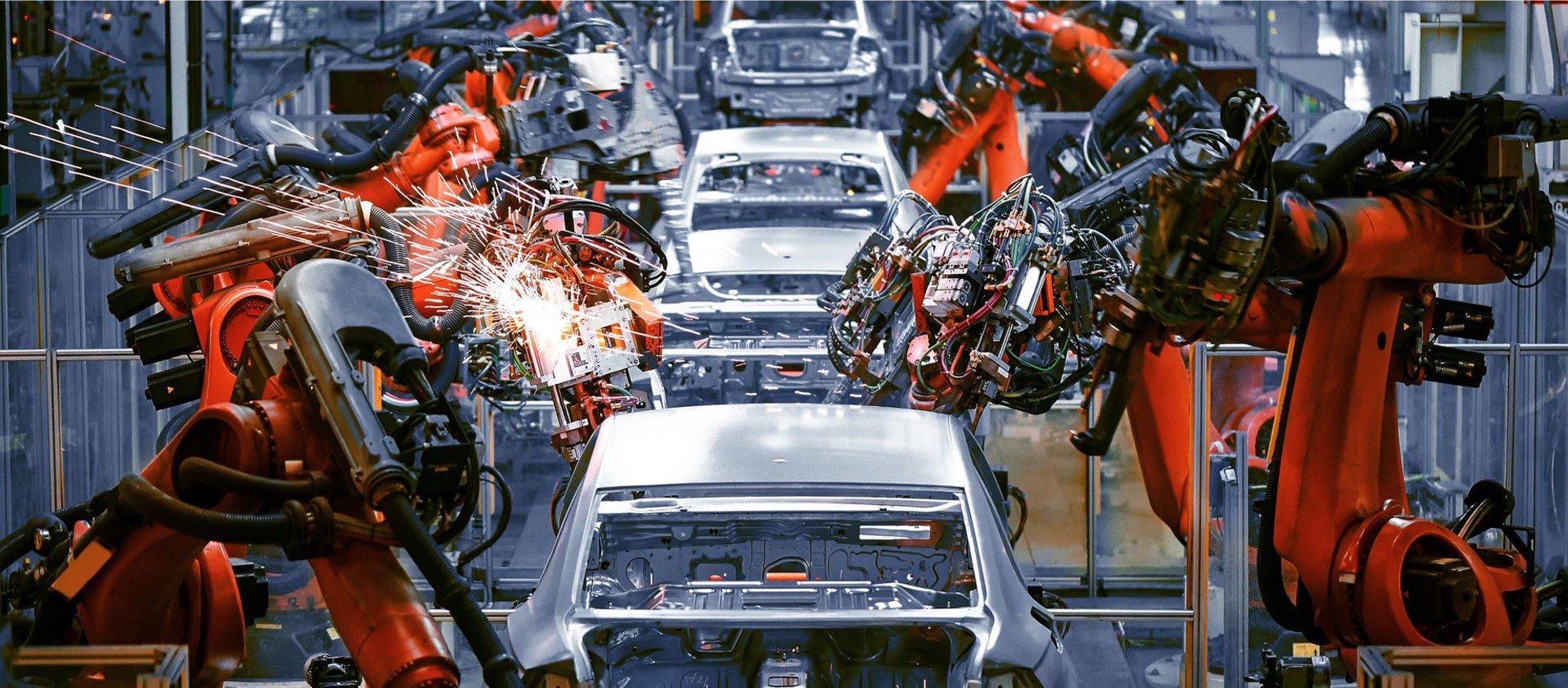
강화학습을 이용한 경로계획 문제 해결
이 게시물은 마키나락스의 OLP 팀이 오픈소스(RLlib)를 사용하여 Multi-Robot Arm의 경로계획 문제를 해결하는 과정을 공유합니다.문제 발견 및 해결
- ML-Agents와 RLlib을 사용하여 포트 충돌 문제 발생
- worker_id 증가 방식을 통해 문제 해결
- 유닛테스트 추가로 안정성 확보
이 글은 AI가 원문을 분석하여 핵심 내용을 요약한 것입니다.